
2010年5月6日改定
2012年10月17日改定
2013年8月1日改定
2022年6月1日改定
2023年7月4日改定
2024年6月1日改定
ロボトレース競技規程
ロボトレース競技は、ロボットに定められた周回コースを走行させ、自律操縦の巧みさとスピードとを競う競技である。ここに出場するロボットをロボトレーサと呼ぶ。
1.ロボトレーサに関する規定
1-1 ロボトレーサは自立型でなければならない。スタートの操作を除き、有線、無線を問わず外部からの一切の操作を行ってはならない。
1-2 ロボトレーサは、競技中に操作者により、ハードウェアおよびソフトウェアの追加、取り外し、交換、変更を受けてはならない。ただし、軽微な修理・調整は許される。
1-3 ロボトレーサの大きさは、走行中の床面への投影が直径25cmの円に収まらなければならない。高さは20cm以内でなければならない。走行中に形状が変化する場合も、常にこの制限を満たしていなければならない。
1-4 ロボトレーサは、接地力を増すための過度な粘着力をタイヤ等に付加してはならない。
2.コースに関する規定
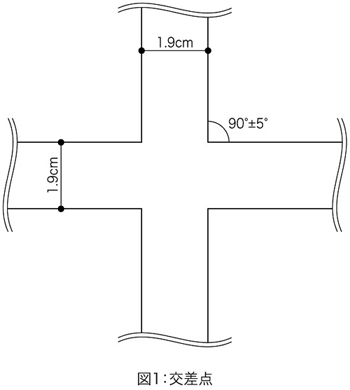
2-1 コースの走行面は黒色とし、コースは、幅1.9cm の白色のラインで示された周回コースである。ラインの全長は60m以下とする。
2-2 ラインは、直線と円弧の組合せにより構成される。ラインは交差することがある。
2-3 ラインを構成する円弧の曲率半径は、ラインの中心を基準に10cm以上とする。また、曲率変化点間の距離は10cm以上とする。
2-4 ラインが交差するとき、交差の角度は90度±5度とする。(図1 参照) ラインが交差する点の前後10cmは、ラインは直線とする。

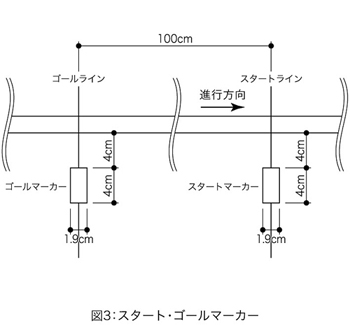
2-5 スタートラインおよびゴールラインを周回コースの直線部分に置く。ゴールラインは、スタートラインの後方1mに置く。ラインの進行方向右側のスタートラインとゴールライン上には、それぞれスタートマーカーとゴールマーカーが定められた位置に貼付される。(図2、3 参照)
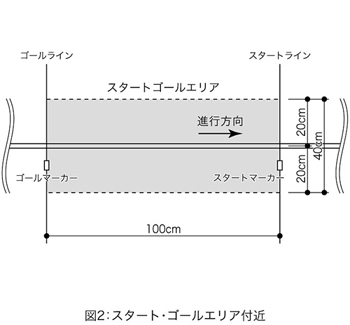
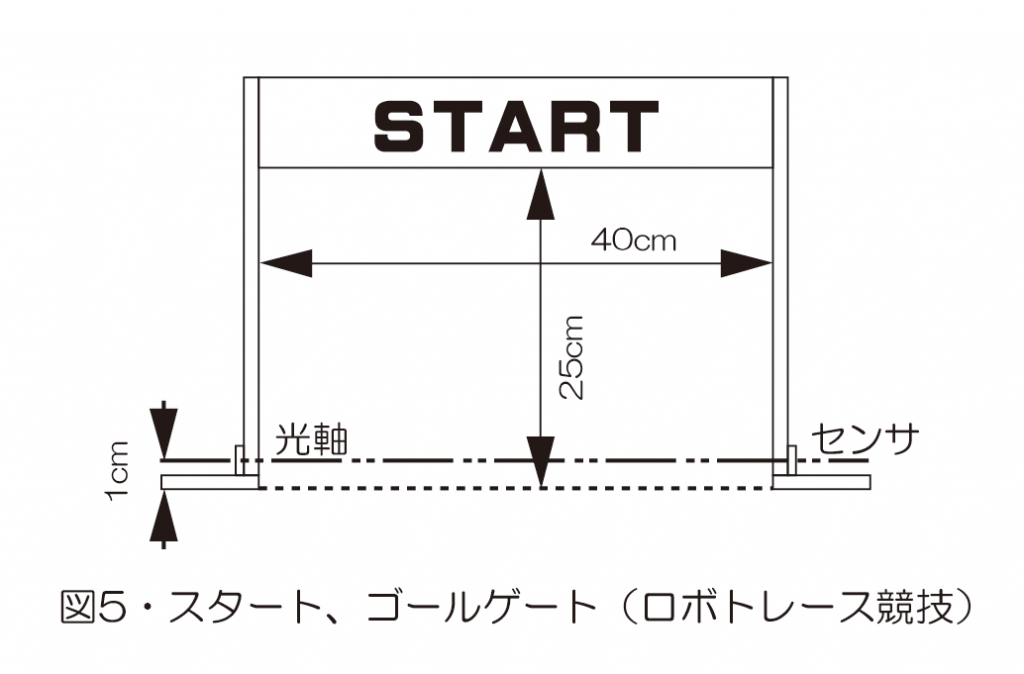
2-6 スタートラインとゴールラインの間のラインの中心から左右それぞれ20cmの領域をスタート・ゴールエリアと呼ぶ。また、スタートラインとゴールライン上には、それぞれスタートゲートとゴールゲートが置かれる。スタートゲートとゴールゲートの内のりは幅40cm、高さ25cmとする。
2-7 スタートラインとゴールラインの前後10cmのラインは直線とする。
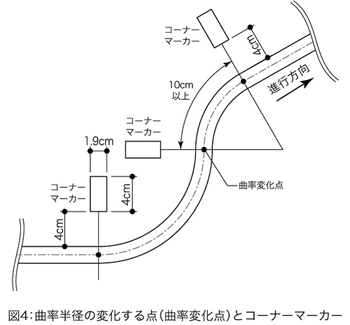
2-8 ラインの曲率が変化する地点には、進行方向左側の定められた位置にコーナーマーカーが貼付される。(図4 参照) コーナーマーカーは他のコーナーマーカーと重ならない。
2-9 コースの走行面は通常水平とするが、部分的には最大5度の傾斜がある場合があるものとする。
2-10 コースの外縁(競技台の端部など)は、ラインの中心から20cm以上離れているものとする。
3.競技に関する規定
3-1 ロボトレーサは、本体の床面への投影が常にコースを示すライン上にあるように走行する。走行中のロボトレーサ本体がライン上から完全に離れた場合をコースアウトとする。
3-2 ロボトレーサは、3分間の持ち時間を有し、この間5回までの走行をすることができる。
3-3 走行は、毎回、コース上に定められたスタート・ゴールエリア内より指定された方向に対して開始するものとする。
3-4 ロボトレーサは周回走行後、スタート・ゴールエリア内に自動停止し、かつ2秒以上停止しなければならない。
3-5 ロボトレーサが各回の周回走行に要した時間のうち、最も短い時間を、そのロボトレーサの周回走行時間記録とする。
3-6 周回走行時間の測定はスタートライン上のセンサがロボトレーサの本体の一部をセンスしてから、ゴールライン上のセンサが同じロボトレーサの本体の一部をセンスする間を計測する。ただし、ロボトレーサの本体の全てがゴールラインを通過しなければ、計測された周回走行時間は記録として認められない。
3-7 ロボトレーサが周回走行中に、コースアウトした場合、もしくは2秒以上停止した場合、その走行が終了したものとする。
3-8 操作者はコースが公開された後でコースに関する情報をロボトレーサに入力してはならない。また競技中にスイッチ操作等で、コースに関する情報を修正、あるいは部分的に消去することはできない。
3-9 操作者は競技委員長の指示、または走行中止の許可がない限り走行中のロボトレーサに触れてはならない。競技委員長は、ロボトレーサが走行不能となった場合、走行中止の申し出を認める。
3-10 競技場の照明、温度、湿度は通常の室内環境とする。照明の調整に関する申し出は受け付けられない。
3-11 競技委員長は必要と認めた場合、操作者に対してロボトレーサについての説明を求めることができる。また、競技委員長の判断で走行の中止、または失格の宣言その他必要な措置を講ずることができる。
3-12 競技の表彰内容及び評価基準は競技会ごとに定める。
注意
1. 競技中にプログラムのローディングおよびROM交換を行うことは許されない。また、競技中にロボトレーサを、本体とは独立した開発装置やコンソールボックスと接続して、プログラム実行に関する指示を与えることも許されない。
2. 競技中にタイヤについた埃やごみ等を、粘着テープ等で除去することは許されるが、摩擦力を増やすために、溶剤等を使用してはならない。
3. スタート操作の後、スタートラインに達する前に、停止またはコースアウトした場合は、1回の走行とみなす。
4. ロボトレーサが周回走行を行い、ゴールラインを通過してもスタート・ゴールエリア内に自動停止しなければ、その回の走行記録は無効とする。
5. 調整等のため、走行時を除いて、スタートゴールエリア以外にロボトレーサを置いてはならない。
6. コースは、曲率の変化する円弧が連続する場合もある(3章にある図4 参照)。
7. ロボトレース競技のコース面は、木材に黒のつや消し塗料が塗布されており、ラインは白のビニールテープ(及びそれに準じるもの)を使用する。走行面は極力平らとなるようフィールドを製作するが、工作・設置の精度により、1mm程度の段差が生じることが有る。また、路面のグリップに関する申し出は受け付けられない。
8. スタートライン及びゴールライン上のセンサについて(図5に示されている)
種類:透過型赤外線センサ
光軸は水平であり、床面より約1cmの高さにある。
大会について
各大会で運営規定や表彰規程が異なります。各大会の発表する運営規定、表彰規程に従ってください。全日本マイクロマウス大会についてのロボトレース競技に関する運営に関する注意事項と、表彰規程に関しては下記のリンクを参照してください。