















=============================================================================
「マイクロマウス(ハーフサイズ)競技」レポート
~過去最長の斜め区画。第二走行で走破したのは優勝マウスのみ!
=============================================================================
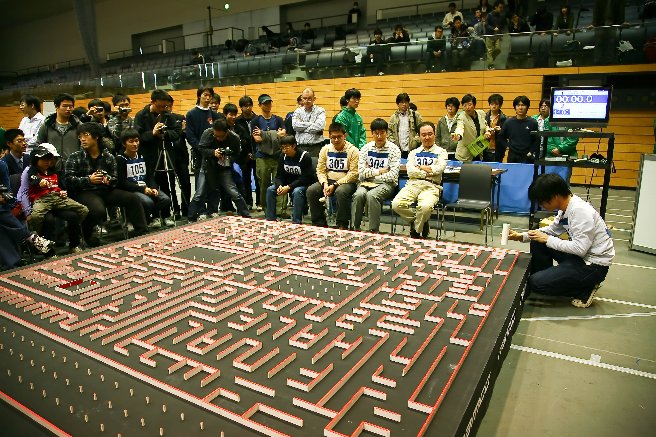 photo699.jpg
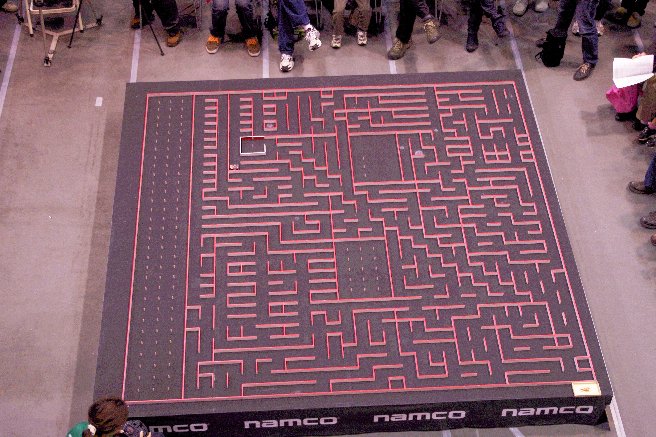
photo699.jpgハーフサイズ競技には、海外勢を含め27台がエントリーした。決勝の迷路は、右下からゴールまで16区画の斜めコースが設定された。過去31年にわたるマイクロマウス大会の中で、一番長い斜め走行だ。今まで誰も挑戦したことがない、最長斜め経路を誰が攻略するのか!? が、今大会最大の見どころとなった。
■完走率が格段にアップした予選
出走したのは20台で、予選でゴールへ到達したマウスは14台だった。予選1位は、加藤雄資氏(名古屋工業大学)の「EggTorte」で記録は4秒647。コンマ1秒の差で小島宏一氏(京都大学機械研究会)の「こじまうす6A」が2位に続いた。昨年度はゴールできれば決勝進出できたが、2回目の大会で既に出場マウスの70%がゴール。参加者のレベルが確実にアップしていることが伺える。予選通過タイムは 32秒017だった。
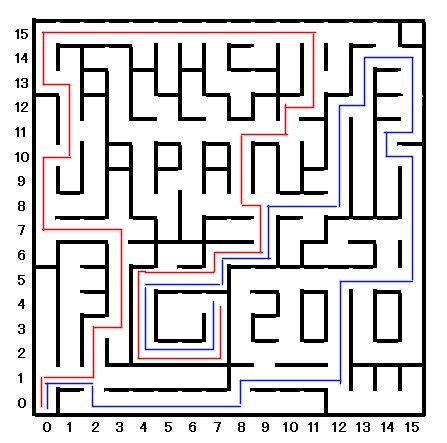 2010herf_pre.jpg
2010herf_pre.jpg【予選迷路】 西回り:62歩25折、南回り:62歩25折
 IMG_0223.jpg
IMG_0223.jpg予選競技風景
■過去最長斜めがある決勝迷路
決勝に進んだマウスは9台。ハーフサイズ競技の決勝は、迷路サイズおよびゴール位置が大会によって異なる。今年は、32×28区画の迷路で、ゴール入口座標はY25,Y22と告知されていた。俯瞰してみると、ゴール位置は壁の上面が白になっているのでわかりやすい。今回の迷路の最大の特徴は、右下からゴールまで伸びた斜めコースだ。ゴールへ到達する経路は複数あるが、単純に歩数と折をカウントすればどのルートもほぼ同じ距離になる。しかし、この斜めを直進できれば、最短となるのは一目でわかる。
これだけ長い斜め経路は、従来の16×16迷路では設定が不可能だった。過去最長斜めを誰が走破するのか? 本大会の見どころとなった。
 IMGP3638.JPG
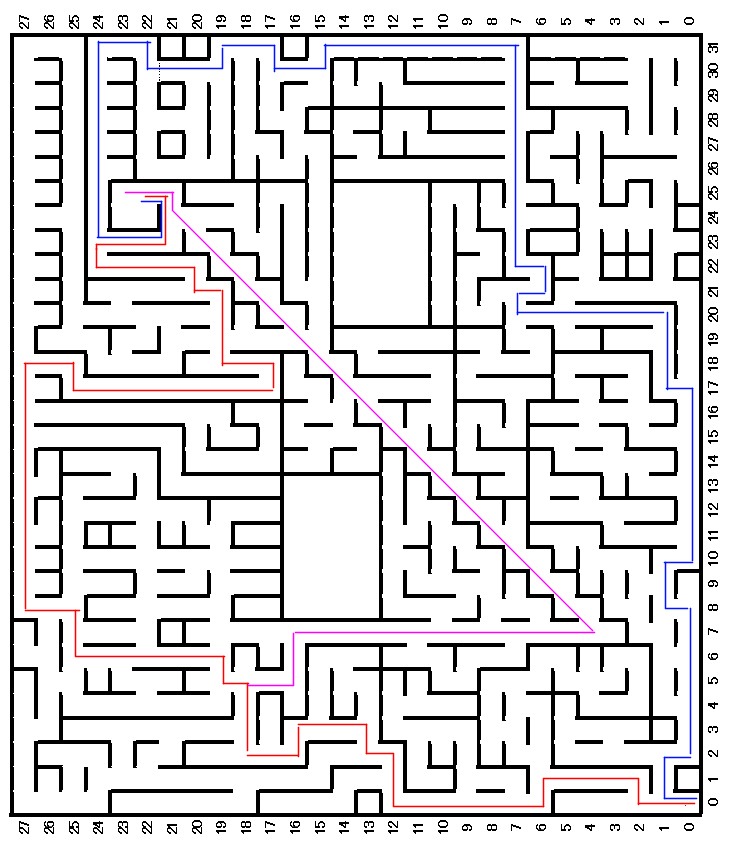
IMGP3638.JPG【決勝迷路】西回り:79歩28折、南回り」79歩30or28折、南西周り:79歩50折
 2010herf_final.jpg
2010herf_final.jpg参加者の間からは「これだけ長い斜めがあると、他のエリアがシンプルになる」という声もあった。しかし、実際に決勝迷路を走った選手は「よく考えられた迷路で、探索に苦労した」という。
迷路の難易度もさることながら、これだけ大きなサイズになると環境がマウスの走行に与える影響も大きい。例えば路面の埃だ。
マウスは、車輪の回転数で移動距離を計測している。そのためタイヤが空回転してしまったり、直進性が失われると実際の位置と計測距離に誤差が生じてしまい、壁にぶつかってしまう。
車輪直径が小さいマウスが、広い迷路を隈なく走るためには、こうした埃対策も見過ごせない。
決勝で最初にゴールに到達したのは、第4走者の「LONG11」(小峰直樹氏)だった。
小峰氏は、今年も全国で開催された全ての地区大会に出場している。地区大会の後、マウスが自己位置推定するプログラムに数学的処理を追加し、動作を安定させたそうだ。「そのおかげで、かなり埃がきつくてもうまく走れるようになった」という。
「LONG11」は、 2分22秒480でゴールに到達し、探索を重ねながらスタート地点に戻った。そのままオートスタートで第2走行にチャレンジしたが、斜めの連続をスラローム走行しているときに壁にぶつかりリタイア。
このポイントは、長い直線を走った後に、135度の角度で斜めに曲がるためマウスの制御が難しいそうだ。「LONG11」だけでなく、この後に走行するマウス達にとっても難関となっていた。3回目も、斜めの中央あたりで右折しようして壁にぶつかっってしまった。
4回目。スタートスイッチを押した小峰氏が「斜めを走りますよ」というようなジェスチャーを示した。宣言どおりマウスは、中央まで斜めを走ったあと、右上に迂回してゴールへ到達した。初めての第2走行達成に「やりましたね。すごいすごい」の声と拍手が会場からあがった。
「LONG11」は、ゴールするたびに探索エリアを広げていく「重ね探索方式」をとっている。そのためこの時点でマウスは、ゴール手前の斜め部分を探索していない。だから、こうした迂回ルートを選択しているのだ。4回目の帰路で、この未知の領域を探索してスタート地点に戻った。
5回目は、当然、斜め一直線でゴールを目指した(と、筆者は思う)。しかし、斜めの手前直線部分に入る手前で壁にぶつかってリタイアしてしまった。
LONG11は、5回目もオートスタートしていた。ハーフサイズは迷路面積が大きいため、タイヤに付着するゴミの影響も大きい。オートスタートではなくなかったら、ラスト走行に成功していたのでは・・・ と残念な気がする。
■ロング11号機 探索走行
■ロング11号機 第2走行。記録:00:16:655
 IMGP3741.JPG
IMGP3741.JPGロング11号機
 IMGP4129.JPG
IMGP4129.JPG探索賞を受賞した小峰氏
優勝したのは、「Excel:Mini-2」(Khiew Tzong Yong氏/Institute of Technical Education)だ。
2回目の走行は、斜めの区画を中央まで走り、中央付近で右折してゴールへ向かったが、壁にぶつかってリタイア。3回目に同じルートをとり9秒774でゴールした。そして重ね探索で、ゴール手前の斜め区画を探索しつつスタート地点へ戻ってきた。
4回目の走行は、明らかに3回目よりもスピードがあった。直線から斜めを一気に走り抜けて、5秒513でゴール。場内から大きな歓声と拍手が沸き起こり、Khiew氏も拍手をしながら、客席にいる仲間を振り返った。
5回目はていねいにタイヤの掃除をしてから、スタート。一段とスピードを上げてマウスが疾走した。斜めを抜けたところでゴールの白壁にぶつかって停止。会場から悲鳴のような声があがった後、一瞬遅れて大きな拍手が起こった。
■Excel:Mini-2 探索走行
■Excel:Mini-2 第2走行。記録:00:05:513
 IMGP4113.JPG
Khiew Tzong Yong氏(Institute of Technical Education)
IMGP4113.JPG
Khiew Tzong Yong氏(Institute of Technical Education)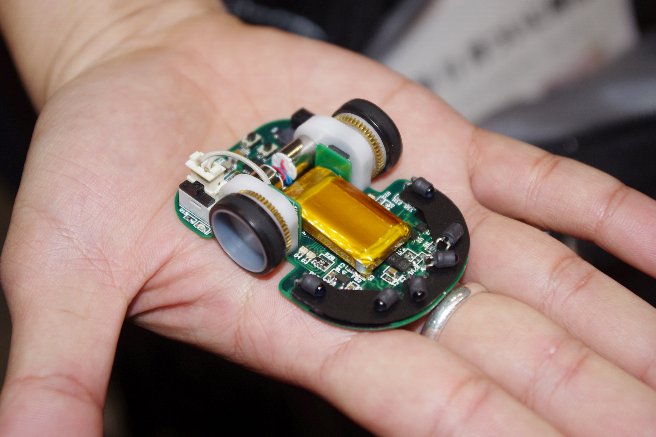 IMGP3737.JPG
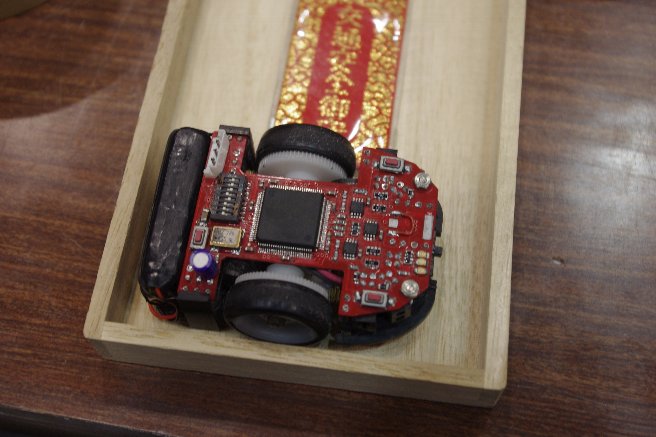
IMGP3737.JPG「Excel:Mini-2」
予選1位通過の「EggTorte」加藤雄資氏(名古屋工業大学)は、最後に登場した。
加藤氏は「最短走行に特化しすぎて、探索がちょっと苦手。タイヤに埃がたまってくると誤差が蓄積され、軌道がずれてしまう」という。その探索走行は、1分51秒185でゴールに到達した後、長い斜めをスルスルとスラロームでクリアし迷路を全面探索しスタート地点に帰ってきた。マウスが斜め区画を抜けきったところで、加藤さんは小さくガッツポーズを出していた。
しかし、第2走行で「EggTorte」が選んだのは、スタートしてすぐ右折し直進するコースだった。記録は8秒373。残りの走行も同じコースをスピードを上げて走ったが、壁にぶつかってリタイアとなった。
「EggTorte」は、去年のマシンよりもエンコーダーやタイヤが小さくなり、重量もわずか12gとなった。「地区大会に出場しマシンの調整を繰り返す中で、センサの配置が悪いことに気づいた」と加藤氏は決勝大会後に語った。ハードの修正する時間がないまま、競技会に出場したそうだ。
決勝の27×31の巨大迷路で、恐れていた影響がでた。探索の後半で、センサが壁を誤認識してUターンしたため、第2走行で最短コースを選べなかったらしい。第3回目以降、タイムを縮めようと最速のパラメタを選んだが、タイヤに付着した埃でエンコーダーの計算が狂い正確なターンができず壁にぶつかってしまったと、競技終了後に語った。
■EggTorte 探索走行。
■EggTorte 第2走行。記録:00:08:373
 IMGP3744.JPG
EggTorte
IMGP3744.JPG
EggTorte IMGP4120.JPG
IMGP4120.JPG加藤雄資氏(名古屋工業大学)
予選2位通過の「こじまうす6A」(小島宏一氏:京都大学機械研究会)は、今大会最少のマウスだ。重量はわずか11g。油田委員長より「これだけ小さなボディに、素晴らしい人工知能を積んでいる。重量比の知能としては、人工物として世界一だろう」と評価され、ニューテクノロジー賞を受賞した。
1回目の探索走行は、ゴールの上あたりまで行って壁にぶつかってしまった。2回目の走行は重ね探索で、前回とは逆エリアを探索しつつゴールした。ゴールを出たところで、壁にぶつかってしまい、まだ、最短経路の探索が終わらない状態。
3回目も探索走行でスタートとなった。残された中央部分を探索し、長い斜めをスラロームで見事に走り抜けてゴールした。
全面探索を終えて、4回目、5回目は最短コースを使って第2走行を試みるも、斜めで壁にぶつかってリタイアとなった。
■こじまうす6A 第二走行。記録:00:57:306
 IMGP4131.JPG
IMGP4131.JPG小島宏一氏(京都大学機械研究会)。ニューテクノロジー賞を受賞。
「Ning4.1」(Ng Beng Kiat氏)は、1回目の走行で全面探索を丁寧におこなった。ゴールへ到達したのが、2分7秒896。その後3分以上かけて迷路を探索しスタート地点に戻った。
もちろん、斜めの最短コースにチャレンジしたが、2回目の走行は135度ターンを入れずに壁にぶつかってUターンした。3回目に、第2走行に成功。斜めは途中で迂回するルートをとり、記録は6秒865だった。
■Ning4.1 探索走行(途中から早送りしています)
■Ning4.1 第二走行。記録:00:06:865
 IMGP3665.JPG
Ning4.1
IMGP3665.JPG
Ning4.1最長斜めに成功した「Excel:Mini-2」
優勝したKhiew Tzong Yong氏は教育関係の仕事をしており、マイクロマウスを教えているので、練習用に13×26の迷路を用意できるそうだ。練習時に、こんなに長い斜めを走らせることはできないので、走り切った後はホッとしたという。迷路が大きくなっても探索のアルゴリズムは、16×16迷路と変わらないが、いかに最短経路を分析するかが難しいという。広くなると全面探索に時間を要するので、重ね探索を採用している。
路面の埃がタイヤに付着すると、エンコーダーが狂ってしまい、壁の見落としなど出てしまう。エンコーダーは、比較的安価に入手できる磁気式を採用。シンガポールでは、小さなモーターを入手するのが困難なため、サーボモーターをばらして転用しているそうだ。
第二走行の速度は、低速・中速・高速の3パターンを用意。今回は、中速で走ったそうだ。3段階の中でも、走る直前に加速やターン速度をきめ細かく設定できるようにしてあるらしい。優勝タイムをだしたときは、加速が6m/sec2、ターンは750m/secだったという。
 IMGP3734.JPG
IMGP3734.JPGインタビューに答えるKhiew Tzong Yong氏(Institute of Technical Education)。
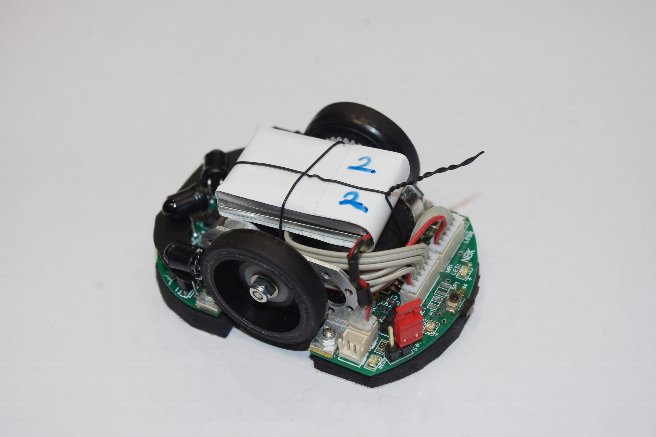
 IMGP3669.JPG
Excel:Mini-2
IMGP3669.JPG
Excel:Mini-2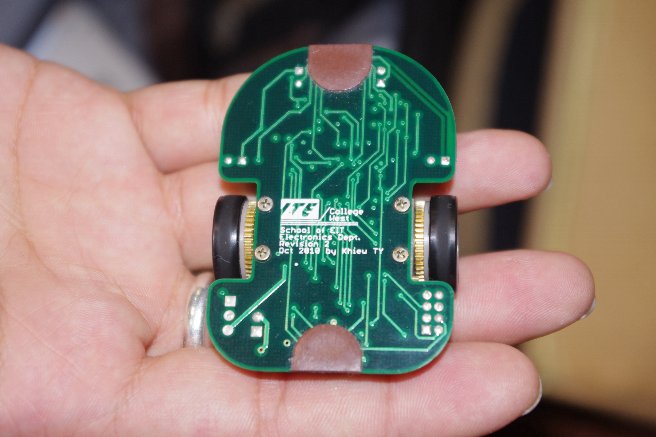 IMGP3738.JPG
Excel:Mini-2の裏側
IMGP3738.JPG
Excel:Mini-2の裏側■スナップ
 IMGP3204.JPG
IMGP3204.JPG IMGP3240.JPG
IMGP3240.JPG IMGP3678.JPG
IMGP3678.JPG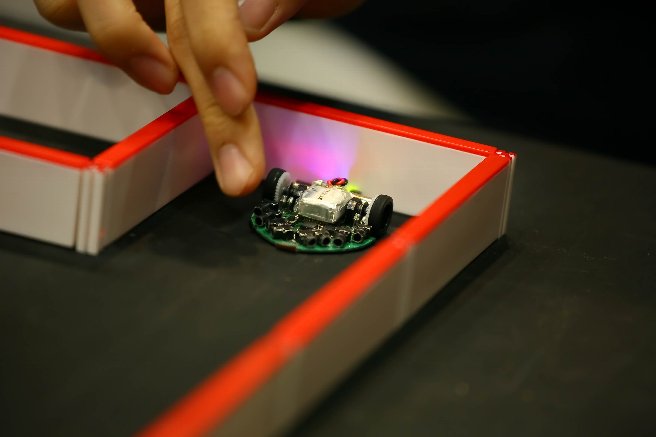 photo403.jpg
photo403.jpg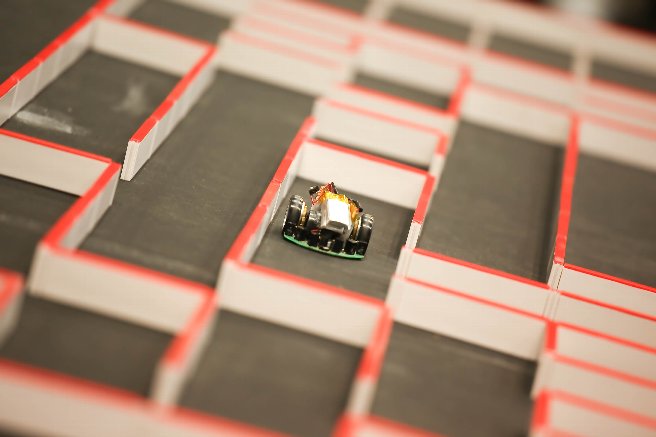 photo694.jpg
photo694.jpg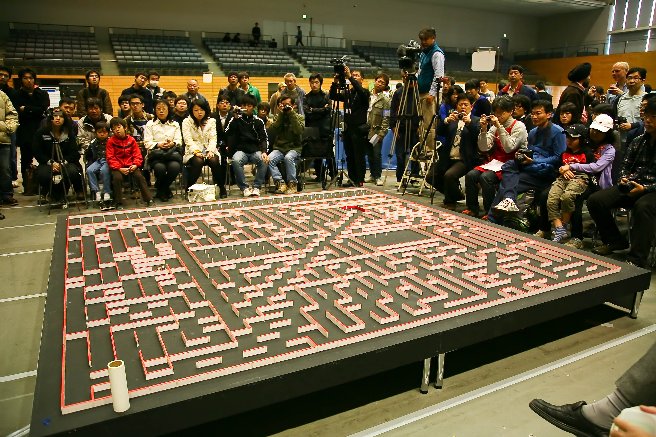 photo720.jpg
photo720.jpg IMGP3646.JPG
IMGP3646.JPG IMGP3675.JPG
IMGP3675.JPG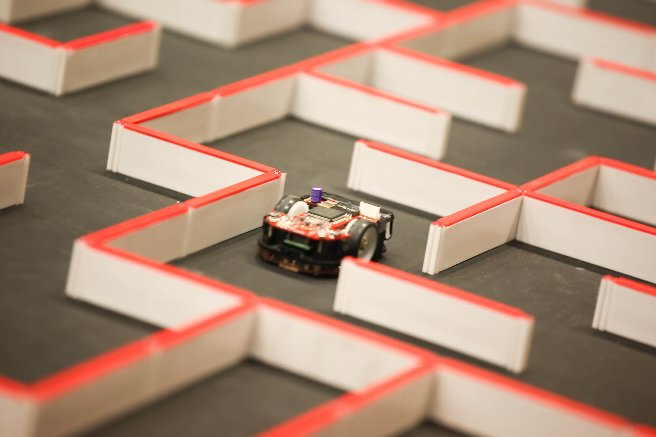 photo735.jpg
photo735.jpg photo809.jpg
photo809.jpg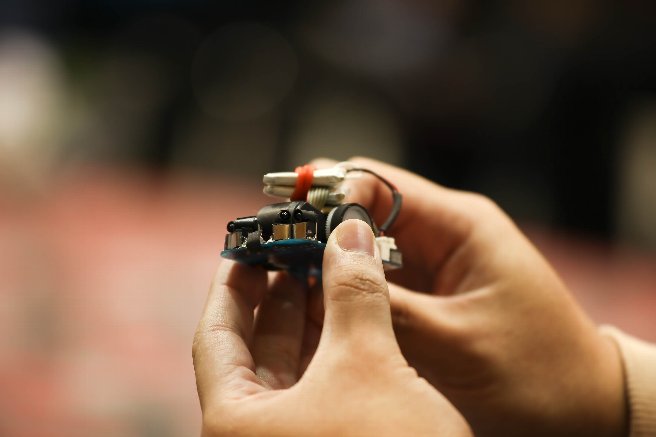 photo814.jpg
photo814.jpg