















「マイクロクリッパー競技」レポート
~優勝はクリッパー歴6ヶ月のWONG WAI KITさん(シンガポール)
=============================================================================
 IMGP3454.JPG
IMGP3454.JPG第31回全日本マイクロマウス大会 クリッパー競技
今大会には、国内から5台、海外から4台のエントリーがあった。マイクロクリッパー競技は、マイクロマウス大会の中でもっとも海外勢の参加率が高い。
優勝したWONG WAI KITさんは、シンガポールのNGEE ANN POLYTECHNICに在籍する学生で今年20歳。優勝マシンは、初めて作ったマイクロクリッパーだという。終始安定した動作で、迷路上にある全ての円筒を返した。
迷路の難易度、円筒配置難易度がともにアップ
マイクロクリッパー競技(以下、クリッパー)は、アーム機構を搭載した自律ロボットが迷路内を走行し、通路上に円筒を発見して反転させる競技だ。迷路内にある全ての円筒を反転し、スタート地点へ戻ってくるまでのタイムを競う。今回は、円筒の置き方だけでなく、迷路自体も実行委員長の油田先生が「意地悪な迷路だな」とコメントするほど難易度が高かった。
 IMGP3398.JPG
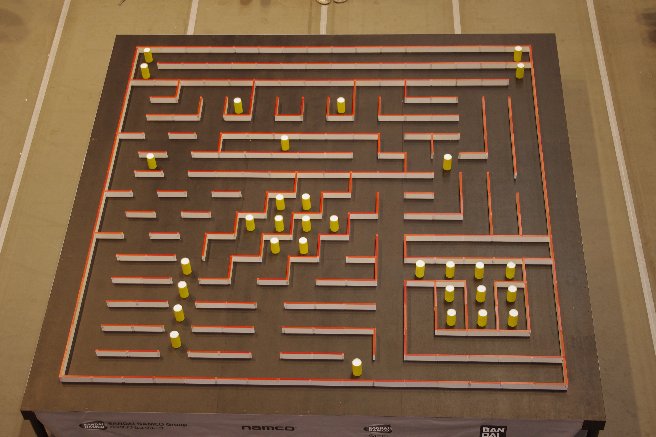
IMGP3398.JPGご覧のように、右下のスタート地点から右折したエリアに10個の円筒が密集して並べられている。中央には階段上に8個、その左エリアには、壁が櫛状になったところに縦に4個連続で配置されている。クリッパーは、走行の妨げにならない位置を考慮しながら円筒を返していかなくてはならない。
円筒の数は、大会によって異なる。今大会は、32個の円筒が置かれていた。全てを返したのは優勝した「Tanker」だけだった。「Tanker」は最後の円筒を返した後、残念ながらタイムアウトになりスタート地点に戻れなかった。
 IMGP3482.JPG
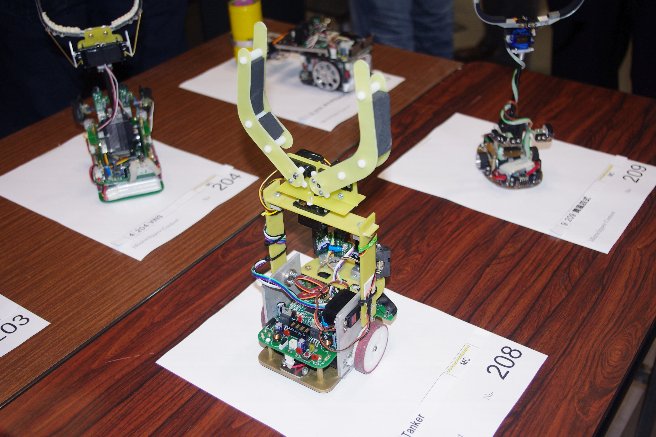
IMGP3482.JPG優勝クリッパー「Tanker」
 IMGP3501.JPG
IMGP3501.JPG
WONG WAI KIT氏(NGEE ANN POLYTECHNIC)
密集エリアの円筒攻略にみるクリッパーの知能
クリッパー競技では、反転した円筒を元に戻した場合はポイントとならない。参加者の技術は、以前と比べて格段にレベルアップしている。数年前までは、一度反転した円筒を再反転するクリッパーもいたが、今年は1台もなかった。円筒は、初期位置で区画の中央に配置されている。反転する際、正確に区画中央に置かなければ、走行の邪魔になる反転済みの円筒を掴み損ねたり倒したりする可能性が高くなる。また、円筒を反転するたびに迷路が常に変化するため、持ち上げた円筒をどこに置くかは重要な戦略だ。
例えば、今大会の特徴である10個密集地点は、反転した円筒を再び移動しなければ迷路に復帰できないポイントになっている。ここを、参加者達がどのように攻略したのか動画で紹介する。
まずは、3位入賞のマイクロクリッパー「VINS」を見てみよう。
「VINS」は、壁の向こうにある円筒は、ハンドをひねってその場回転している。前進したい方向にある場合、円筒を持ち上げて1区画進んでから背後に置く。一旦、反転した円筒は持ち上げた時にハンド部分を反転し再反転しないようにしている。
このように、クリッパーの基本動作を安定して行っていた。記録は、27個だった。
次に優勝した「Tanker」(WONG WAI KIT氏/NGEE ANN POLYTECHNIC)の動画を見てほしい。「Tanker」は、競技時間残り2分程でこのエリアに入った。
27個目の円筒を返す動作が、「VINS」と違うことに注目してほしい(動画内「ココ!」)。23~24個目、26個目は1区画前進して背後に反転していたのに、27個目はその場で反転させている。「VINS」は、この円筒も1区画前進で後ろに置く動作を取っていたため、行き止まりから反転するために円筒を再反転しなければならなかった。「Tanker」の処理の方が、賢いことは一目瞭然だ。
「Tanker」は、見事に32個全ての円筒を反転し優勝した。
この密集エリア攻略で最も"賢さ”を見せたのは、準優勝した「舞風」(寺田 篤氏/東京農工大学ロボット研究会R.U.R)だ。
「舞風」は、まず入り口にある円筒を持ち上げてそのまま背後の壁の向こう側に置いている(動画内「ココ!」参照)。T字部分に並んでいる円筒も、同様に背後に置いた(動画内「ココ2!」参照)。このように置くことで、密集地帯の袋小路から迷路に復帰する際に、移動の邪魔になる円筒を減らしているのだ。
ちなみに、舞風が袋小路から抜け出す際に、再移動した円筒は3個。一方、優勝した「Tanker」は5個を再移動している。こうした動きに、「舞風」の賢さがよく表れている。
賢い動きという点で、もう1台紹介したいクリッパーがある。バンダイナムコ賞を受賞した「ヌクヌクDASH Alter」(青木政武氏/山中湖ロボットクラブ)だ。
「ヌクヌクDASH Alter」は、迷路中央付近の階段状に並べられた円筒を元の位置に対して90度の場所に缶を置いていた。
競技会当日は、並行して複数競技が行われていたため、全クリッパーのモーションをチェックしたわけではないが、筆者が見た限りではこのような反転方式をとっているのは「ヌクヌクDASH」だけだった。このモーションは、階段状に並べられた円筒を返すには、特に有効だろう。
迷路の難易度が競技を左右する!?
前述のとおり「Tanker」は、WONG WAI KIT氏が初めて作ったクリッパーだ。WONG WAI KIT氏は、NGEE ANN POLYTECHNIC(日本の高専のような学校らしい)に通う学生で20才。
「Tanker」はハードを2カ月、ソフトを4カ月掛けて開発したそうだ。円筒を持ち上げて反転する際に、重量バランスをとるのが大変だったという。
今回のように円筒が密集していると難しかったのは? と伺うと「学校で練習する時は、ほぼ全面に並べることもあるので大丈夫」と答えた。
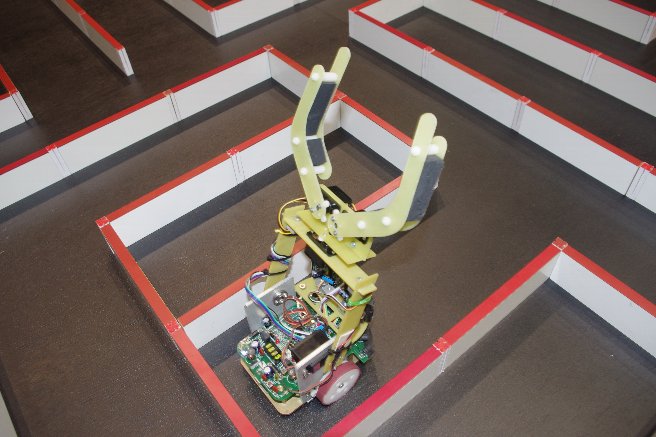 IMGP3517.JPG
IMGP3517.JPG IMGP3505.JPG
IMGP3505.JPG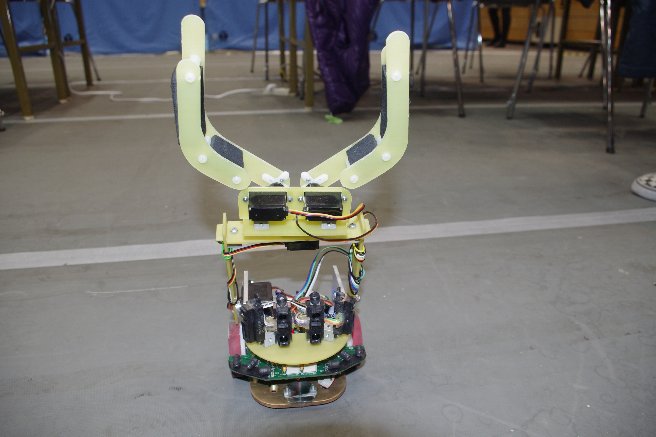 IMGP3506.JPG
IMGP3506.JPG「Tanker」。 前壁センサ6個、円筒発見センサ4個を搭載している。
準優勝した「舞風」を制作した寺田 篤氏(東京農工大学ロボット研究会R.U.R)も同様の意見だった。密集した円筒よりも、迷路自体の難易度がネックだったそうだ。
寺田さんは「昨年のエキスパートの迷路を参照して、対策を練ってきていたのだけど、予想以上に難しかった」と語った。
以前は、円筒をちゃんと返せるか? が見どころになっていたクリッパー競技だが、2~3年前からプログラムの作りこみでが勝敗を握るようになってきた。今後は探索の賢さ、スラーローム走行など次々と高い技術に挑戦するクリッパーが登場してくるだろう。
 IMGP3508.JPG
IMGP3508.JPG「舞風」。小型軽量が特徴。ハンド部分を外せばマイクロマウスとして競技に出場できるのが開発コンセプトだという。
 IMGP3514.JPG
マイクロクリッパーは、機構に特徴があり面白い。
IMGP3514.JPG
マイクロクリッパーは、機構に特徴があり面白い。