















=============================================================================
「マイクロマウスクラシック競技」レポート
~7年ぶりに日本人が優勝! ついに5秒の壁を破った。
=============================================================================
 IMGP3248.JPG
IMGP3248.JPG第31回全日本マイクロマウス大会
今大会は、フレッシュマンクラスに121台、エキスパートクラスに75台のエントリーがあった。その他、エキスパートクラスの決勝には、地区大会や学生大会で優秀な成績をおさめた9台のマウスがシード権を得て参加し、過去最大の出場台数となった。
今年は優勝した加藤雄資さん(名古屋工業大学)から4位までが4秒台をマークし、マイクロマウスの高速化が一段と進んだ。
■エキスパートクラス
予選に国内から53台、国外から22台が出場した。予選の上位は海外勢が占めた。国内の有力ロボットは、地区予選や学生大会で決勝出場シード権を得ており予選には出場していないとはいえいささか寂しい。
ゴールへたどり着いたマウスは47台。予選1位のMin7.1(Ng Beng Kiat氏/Ngee Ann Polytechnic)の記録は5秒221。予選通過し決勝に進出できるタイムは、14秒746だった。
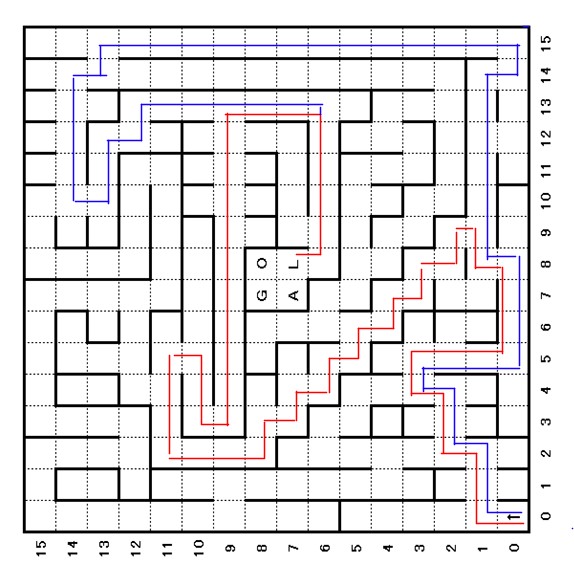
【予選迷路】 西回り:66歩29折、南回り:66歩19折
 2010_exspartpre.jpg
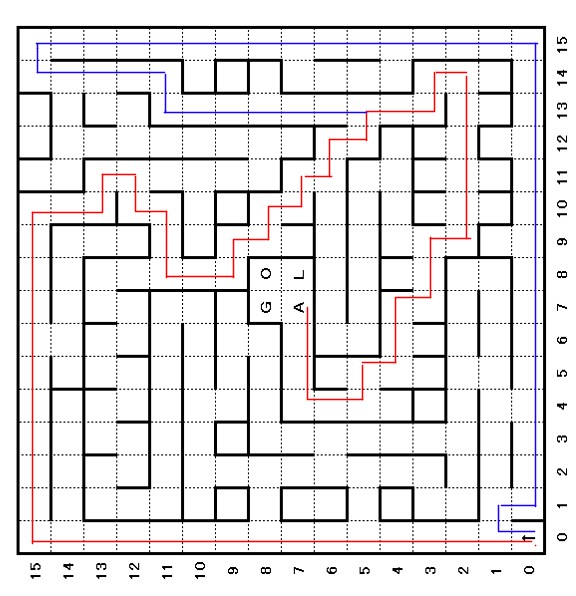
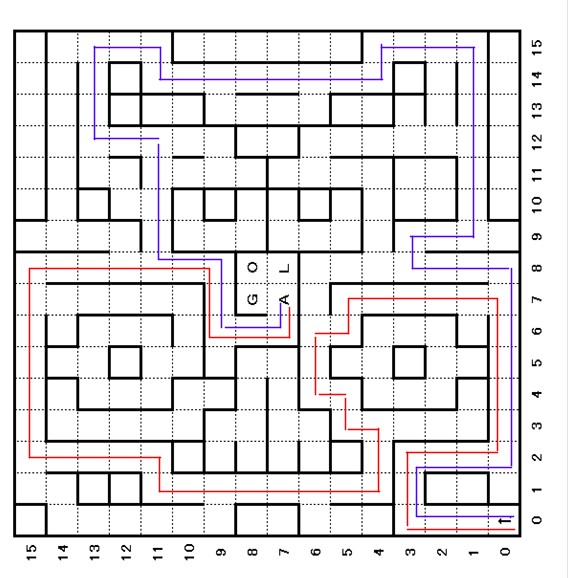
2010_exspartpre.jpg【決勝迷路】西回り:57歩34折、南回り:59歩22折
 2010_exspartfinal.jpg
2010_exspartfinal.jpgエキスパートクラスの決勝は、他の競技と異なり照明が明るくなり、厳しい状況の中で行う。このため、センサの調整に苦しむ参加者が多いのが常だ。
完走率は77.7%だが、第二走行で記録を出したのは44.4%と半数以下だ。コースの複雑さもあるが、やはりセンサの調整で高速走行が難しいようすが伺われた。
第2走行で高速に迷路を走りぬけるには、いかに無駄なくターンするかが重要になる。参加者は、高速時に正確に右左折できるようにマウスを設定している。ところが、迷路図を見ておわかりのように、今回はスタートしてすぐに右折しなくてはならない。つまり、短区間で加速していないと想定どおりにマウスを制御できず安定して曲がることができないのだ。
競技を見ていると、右折後のT字路で左折する際にバランスを崩しているマウスもいた。
■YU-05 BRAV(内田雄太郎氏/電気通信大学ロボメカ工房)の4回目の走行。記録は8秒753。特別賞受賞
以前ならば、このくらい姿勢を崩したら壁に当たって走行不能になるところだが、最近のマウスは自ら姿勢を正しゴールに向かうだけの性能を持っている。
毎年、競技会を見るたびに、その技術の進歩に驚かされる。
技術の進歩が一番表れるのは、もちろん記録だ。今年はとうとう4秒台で優勝を争うようになった。優勝した加藤雄資さん(名古屋工業大学)のTetraの記録が、4秒@@@。以下、4位までが4秒台。しかも1位と4位の差がわずか0.249秒という僅差だった。
Tetraは、第1走行を@@@秒でゴールした後、全面探索をしてスタート地点に戻った。搭載されている第2走行のスピードは8段階あり、下から2番目のモードで第2走行をスタート。いきなり、4秒96をマークして会場を感嘆させた。
エキスパートは持ち時間5分と短いのだが、加藤さんは走行の合間にマシンの手入れをしつつ、インタビューに答える余裕も見せていた。スピードを上げた3回目の走行で、タイムを4秒693に縮めた。
4回目は、壁にぶつかりリタイア。最終走行は、果敢にマックススピードで挑戦したが、惜しくもリタイアとなった。
■「Tetra」の探索走行。
■「Tetra」の第2走行。記録は4秒693。
Tetraは、関西でシード権を得ていたため走行順位が6番目と早かった。その後、出走するマウス達は、Tetraの記録を目指すことになる。
東日本でシード権を取った「Micesweeper」(宇都宮正和氏)が、バキュームマウスで4秒942を出し、2位につけた。
■「Micesweeper」(宇都宮正和氏)の探索走行
■「Micesweeper」(宇都宮正和氏)の第2走行。記録は、4秒942。
その後、予選上位のマウスが次々と出場するが、5秒の壁はなかなか破れない。
「Excel-7a」(Khiew Tzong Yong氏/Institute of Technical Education)が、第2走行を8秒228、6秒993、5秒475と走る毎に記録を縮め、最終走行で4秒940。「Micesweeper」に2/1000秒の差をつけて2位に食い込んだ。
■「Excel-7a」の探索走行
■「Excel-7a」の第2走行
そして、最後に予選を1位で通過した「Min7.1」(Ng Beng Kiat氏/Ngee Ann Polytechnic)が登場した。
「Min7.1」は、2回目の走行で5.058秒を出し、4位に踊りでた。もちろん、この後、スピードを上げていく。しかし、3回目の走行は、ゴールの入り口で左折できずリタイア。4回目は、きれいにゴールして4.807で順位を2位に上げた。
最終走行に挑む前、Kiat氏はモニターに表示された「Tetra」の記録を確認した。会場が緊張で張り詰める中、「Min7.1」は迷路を疾走する。長い斜めを疾走したときに出口で壁に車体を擦った。姿勢を立て直して走り続けたものの、連続のUターンを曲がり切れずにリタイアした。
■「Min7.1」(Ng Beng Kiat氏/Ngee Ann Polytechnic)の探索走行
■「Min7.1」(Ng Beng Kiat氏/Ngee Ann Polytechnic)の第2走行。記録は4.807。
会場は、Kiat氏のチャレンジと7年ぶりに誕生した日本チャンピオンに大きな拍手で沸いた。
Tetraのコンセプトは、低慣性だという。カーブを高速で曲がると、Gがかかりスリップしやすくなる。加減速や旋回時のグリップを保持するために、4輪を選択した。
ソフト面では、光センサの扱いを徹底的に研究しているそうだ。例えば直線を走行する際、両側に壁がある場合とない場合がある。壁がないところはセンサの値が変わる。センサの値をチェックし、壁の有無にかかわらず通路の中央を走るように複雑な処理をしているそうだ。
 IMGP4091.JPG
IMGP4091.JPG優勝した加藤雄資さん(名古屋工業大学)
 IMGP4029.JPG
IMGP4029.JPGTetra
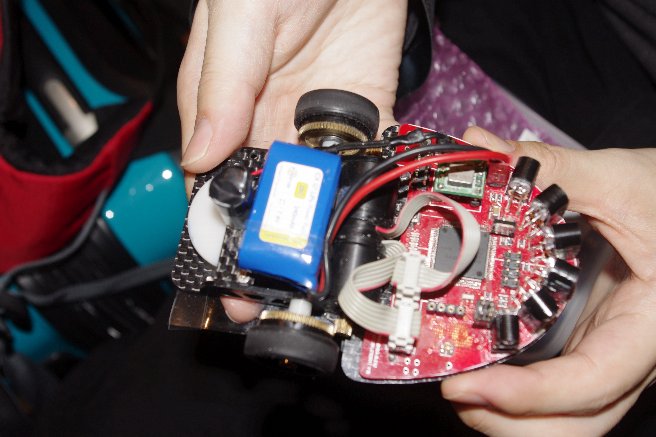
4位の宇都宮正和氏はバキュームマウス「Micesweeper」で、5秒の壁を突破した。昨年のマウスはトルクが弱くて限界を感じていたため、バキュームを実装したという。腹部に吸引機構を搭載して、トルクを上げるのは新しいアイデアではない。マイクロマウス競技でも、2000年くらいから実装している参加者がいる。
しかし、この数年の機体の小型化でマウスに実装するのは、技術的に困難である。長年、バキュームマウスを研究している人も、なかなか大会で記録を出せない。
宇都宮氏は、ロボトレース競技に出場している平井雅尊さん(電気通信大学IS研究科)から他のロボコンで活用している吸引の機構について情報をもらったそうだ。
機体は完成したものの、ターンのパラメータ調整がうまくいかず、大会直前まで調整に苦労したそうだ。
決勝では、ターンが少ないコースを選択し確実に記録を狙った。
 IMGP4097.JPG
IMGP4097.JPG4位入賞の宇都宮正和氏
 IMGP4031.JPG
IMGP4031.JPGMicesweeper
エキスパートクラス決勝の前に、筆者はマイクロマウス委員会の麥田憲司氏(日本システムデザイン)から興味深い話を伺った。麥田氏は第2回全日本マイクロマウス大会に出場し、優勝した人物でもある。
麥田氏は「マイクロマウス競技を見ると数年後の日本が見えてくる」という。
1980年にマイクロマウス競技がスタートし、その後、日本の工業技術は発展した。2000年頃は、技術大国と言われ世界でも高く評価されるようになった。しかし、マイクロマウス競技会では、90年代後半には韓国勢が台頭してきていた。2003年以降は、シンガポール勢が競技会を席捲している。
実際、現在の日本は、技術新興国と言われながらも、若者の技術離れが目立ち、組込技術者不足になやみ国際競争力が低迷してきている。
このようにマウス競技会の情勢が、数年後に世界経済の状況に表れているというのだ。
お話を伺って、なるほどと思った。
マイクロマウスで日本勢が優勝できない時代が続き、かつて国際社会で高い評価を得ていた日本のモノ作りも苦しい状況に立っている。
今年で31年目を迎えるマイクロマウス競技は、国内に多くの技術者を生み出してきた。マイクロマウス競技は、難易度が高くルールが固定されているため、10年以上のキャリアを積んだ人が好成績を残す傾向にある。
それが、この数年の大会で学生や若手の活躍が目立つようになった。今回は決勝に出場した国内勢の17人中12名は学生だ。そうして、今年はとうとう7年ぶりに日本人が優勝した。
厳しい情勢の中で、マイクロマウス競技会に新しい流れが生まれているのを感じる。これからの日本のモノづくりを支える技術者が、マイクロマウス競技を通じて育っているのだ。彼らが、この先どのように社会の中で活躍していくのか、多いに期待したい。
-------------
●注目マウス紹介
-------------
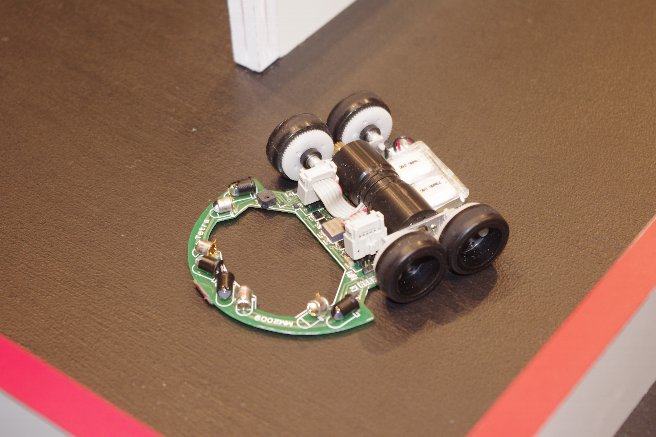
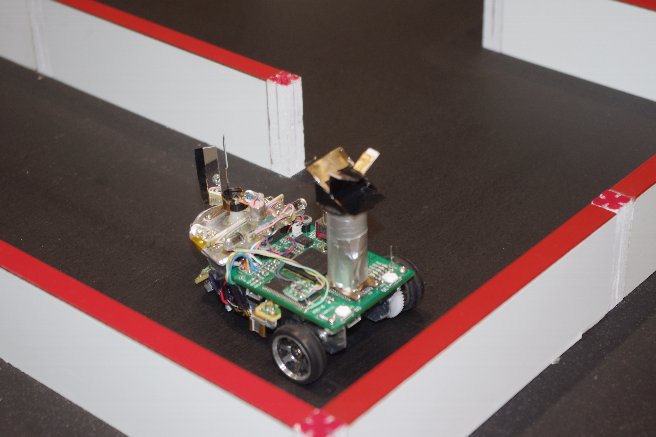
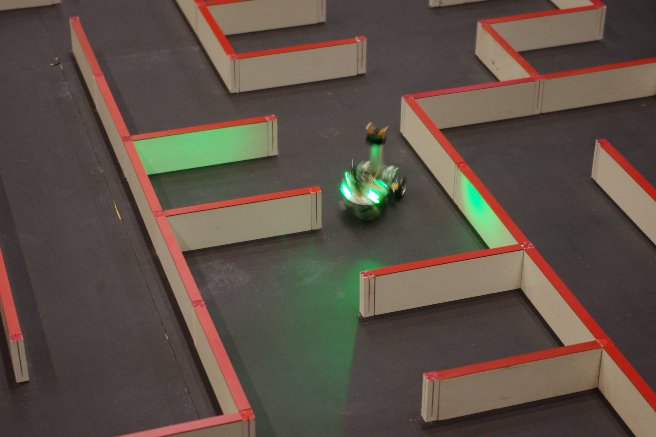
決勝には残らなかったものの、カメラセンサを搭載し迷路を走破して注目を集めたマウスがあるので紹介したい。山下伸逸氏が製作した「mm6」だ。
山下氏は第2回、3回の全日本マイクロマウス大会に参加。その後、マイクロマウスから離れていたが、数年前にインターネットで競技会が続いていることを知り、本業の技術を活かし、カメラセンサで迷路探索をするマウスを3年かけて開発した。
シーモスカメラ用の基板は、ボディの後方にある円筒の下に搭載されている。円筒の上に斜めに取り付けたミラーが、前方2枚のミラーが映し出す左右の壁と、その鏡の隙間から2区画先までの前方情報を得ている。
前方と左右に4つあるLEDがヘッドライトの役割を果たし、緑色の光でマウスの周囲を照らす。FPGAでCPUを2つ搭載し、1つを画像処理専用に使用。床と壁のエッジを画像処理で検出しているそうだ。
山下氏は、「速度を競うよりもオリジナリティを極めたかった」と製作の動機を語った。車体を3輪にしたのもその表れだという。
予選は46秒030でゴールしたものの、第2走行はリタイヤ。残念ながら、決勝進出は叶わなかったものの、新奇な技術が委員会と参加者の注目を集め、決勝前に時間を設けてデモンストレーション走行を披露した。
■「mm6」(山下伸逸氏)のデモンストレーション
 IMGP3267.JPG
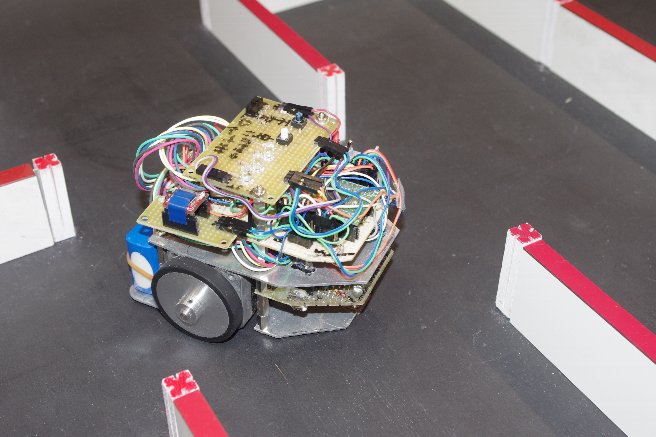
IMGP3267.JPG「mm6」(山下伸逸氏)。3輪マウス。後輪駆動のため、後退する時には、ステアを切らなくてはならず制御が難しかったという。
 IMGP3273.JPG
IMGP3273.JPG画像認識精度をあげるため、周囲を緑色のヘッドライトで照らしながら走行する
 IMGP3224.JPG
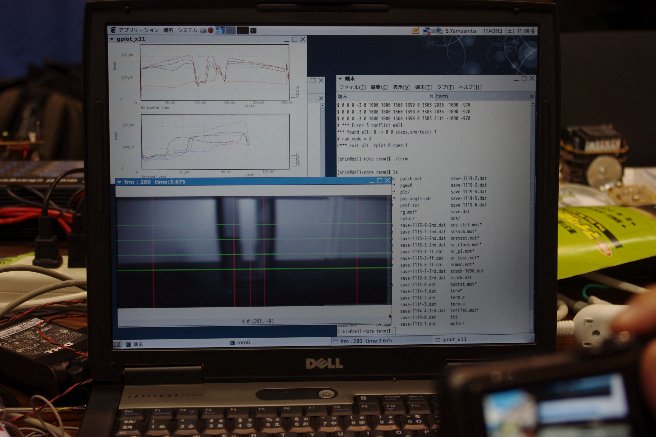
IMGP3224.JPGPCでマウスが周囲を解析している状況を表示
 IMGP3293.JPG
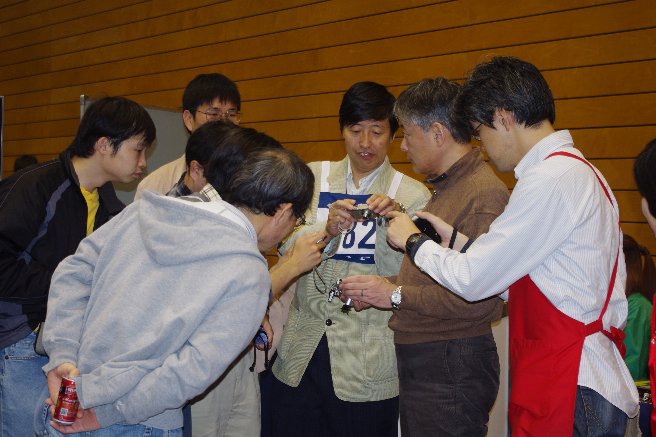
IMGP3293.JPG新しい技術チャレンジに多くの参加者が興味を示し、山下氏に多くの質問が寄せられた。
-------------
■フレッシュマンクラス
-------------
フレッシュマンクラスは年々出場台数が増加し、マイクロマウス競技のすそ野が広がっていることが実感できる。
【フレッシュマン迷路】西回り:56歩19折、南回り:56歩19折
 2010_fresh.jpg
2010_fresh.jpg優勝は、「CMS1」(PEH Lian Soon氏/Shining Sunlight International)の7秒506。 2位に「おやびっちゃ」(村上青児氏/東京理科大学 Mice)が8秒25、3位に「ハセシュマウス ver.0.5」(長谷川峻氏/渋谷幕張中学電気部高校物理部)が10秒253で続いた。
長谷川峻氏は、高校1年生。小学4年の時にレゴマインドストームでロボットの面白さを知り、中学1年から自作ロボットを作っているという。今年の夏に、森永英一郎氏のベーシックマウスを参照して、マイクロマウスをスタート。
夏休み中、時間が許す限り秋葉原のアールティに通って、マウスの作り込みをしたそうだ。
今年のフレッシュマンでゴールに到達したのは52台。来年からは、彼らもエキスパートクラスで、世界最速を目指す。
 IMGP3320.JPG
IMGP3320.JPG2位の村上青児氏(東京理科大学 Mice)
 IMGP3747.JPG
IMGP3747.JPG「おやびっちゃ」
 IMGP3325.JPG
IMGP3325.JPG長谷川峻氏(渋谷幕張中学電気部高校物理部)
 IMGP3751.JPG
IMGP3751.JPG「ハセシュマウス ver.0.5」
-------------
■スナップ
-------------
 IMGP3380.JPG
IMGP3380.JPG会場のつくばカピオ
 IMGP3195.JPG
IMGP3195.JPG出場者受付
 IMGP3203.JPG
IMGP3203.JPG最終調整風景
 IMGP3757.JPG
IMGP3757.JPG決勝進出マウスを間近でチェックする参加者たち
 IMGP3761.JPG
IMGP3761.JPG迷路が公開され、競技開始を待つ。会場に緊張感が満ちる。
 IMGP3860.JPG
IMGP3860.JPGエキスパート決勝を見守る参加者たち
 IMGP3369.JPG
IMGP3369.JPGマウスパーティ