

「つくばチャレンジ2010ファイナル走行」レポート
~難易度の高い約1.1Kmのコースを7ティームが完走し、課題を達成!(つづき)
●ゴールはならなかったものの惜しいティームも続出
その後、電気通信大学知能システム学講座ティームの「CARTIS TypeR」(タイム25分48秒)、Scuderia Frola AISTティームの「Marcus」(タイム24分31秒)、富士ソフト/筑波大学MRIMプロジェクトティームの「TUFS2010」(タイム26分26秒)が、見事にゴールに到達。合計で7ティームがファイナル走行を達成した。しかし、ゴールまであと数十mというところで、街路樹の縁石にぶつかってしまいリタイヤした、宇都宮大学尾崎研究室B ERIEティームの「ERIE」やTeam AMSL Racing(明治大学黒田研究室)ティームの「Infant」のように、あと一歩でゴール達成という惜しいティームも続出した。
九州工業大学 CIR-KITティームの「KIT-C3」は、815m地点でコースが左に逸れてしまい、植木鉢にぶつかりそうになり、回避するためにまっすぐバックしたのだが、その後もまた同じコースで前方に進み、またバックするというループにはまってしまった。そのループに陥っている状態のロボットのすぐそばを、杖をついた年配の方がすれ違う場面があったが、その方はロボットを気にせずにそのまま通過していった。
宇都宮プロジェクトティームの「アロマックス3」。270m地点でリタイヤしたが、その後そこからリスタートしてゴール直前まで来たが、走行コースが自動ドアがある入り口から数mずれてしまい、それ以上進めなくなってしまった

入り口まではわずか数mだが、アロマックス3はここで再び断念

電気通信大学知能システム学講座ティームの「CARTIS TypeR」。セニアカーベースのロボットで、走行もスムーズであった

CARTIS TypeRも見事ファイナル走行を達成。タイムは25分48秒

宇都宮大学尾崎研究室B ERIEティームの「ERIE」。狭い道も着実に走行している
停止線の前で、一時停止し、再びスタートするERIE。音声ガイダンス機能も備えている

ERIEは、ゴールまであとわずかの1095m地点で、街路樹の周りの縁石にぶつかりリタイヤ

Scuderia Flola AISTティームの「Marcus」。電動車椅子ベースのロボットだ

Marcusは安定した走行で、見事ゴールに到達。タイムは24分31秒だ

法政大学自律ロボット実験室A(ARL)ティームの「Orange2010」。残念ながら559m地点でリタイヤ

九州工業大学 CIR-KITティームの「KIT-C3」。順調に走行してきたが、陸橋を渡ってすぐのところで、左に逸れてしまった
KIT-C3は、植木鉢を検出してバックするのだが、また同じ方向に進んでしまい、再びバックするというループにはまってしまった

リトライを繰り返すKIT-C3の後方に、Team AMSL Racing(明治大学黒田研究室)ティームの「Infant」が接近してきたところ
KIT-C3と植木鉢との狭い隙間を、杖をついた年配の方がロボットを気にせずに通過していった様子。KIT-C3は、結局この場所(815m地点)でリタイヤ

富士ソフト/筑波大学MRIMプロジェクトティームの「TUSF2010」。前方に小型ヒューマノイドロボット「PALRO」を乗せている
TUSF2010がゴール地点近くの折り返しポイントを通過する様子
停止線の前で、一時停止するTUSF2010。PALROの音声発生機能を利用して、音声ガイダンスを行っている
TUSF2010もゴールまで無事到達。7台目の完走ロボットとなった。タイムは26分26秒
InfantがKIT-C3を追い越す様子。バックしてきたKIT-C3にInfantが危なくぶつかりそうになったのだが、緊急停止ボタンが押されてKIT-C3が停止。そのすぐ横をInfantが追い抜いていった
縁石ギリギリをすり抜けていくInfant
停止線での一時停止後、再スタートしたが、街路樹の縁石にぶつかってしまいリタイヤ。距離は1097mで、ERIEがリタイヤした場所とほぼ同じだ
●参加ティーム全体の技術レベルが大きく向上
今回のつくばチャレンジ2010は、実際に走行したティームが64ティームで、トライアル走行達成が31ティーム、ファイナル走行達成が7ティームという結果になった。ファイナル走行達成のティーム数は、2007年が3ティーム、2008年が1ティーム、2009年が5ティームであり、今回は過去最多の達成となる。課題が年々難しくなっているにもかかわらず、着実にロボット技術が進歩しているといってよいだろう。
最後に油田教授による、結果発表と講評が行われた。その中で油田教授は「走行順を変えたことで、ロボットがロボットを追い抜くシーンが増えた。他のロボットに迷惑をかけないように走行し、追い抜きや追い越しに対処するというのは、実用化を目指す上で重要な経験となるだろう。今回、完走が7ティーム、惜しかったティームが2つあったというのは、技術レベルが全体としてとても向上したといえる」と述べた。

ファイナル走行の最終結果。オレンジ色の磁石がリタイヤ地点である。番号はロボットのエントリーナンバー。トライアルゴールを通過してすぐの停止線のあたりでリタイヤしたロボットが多い
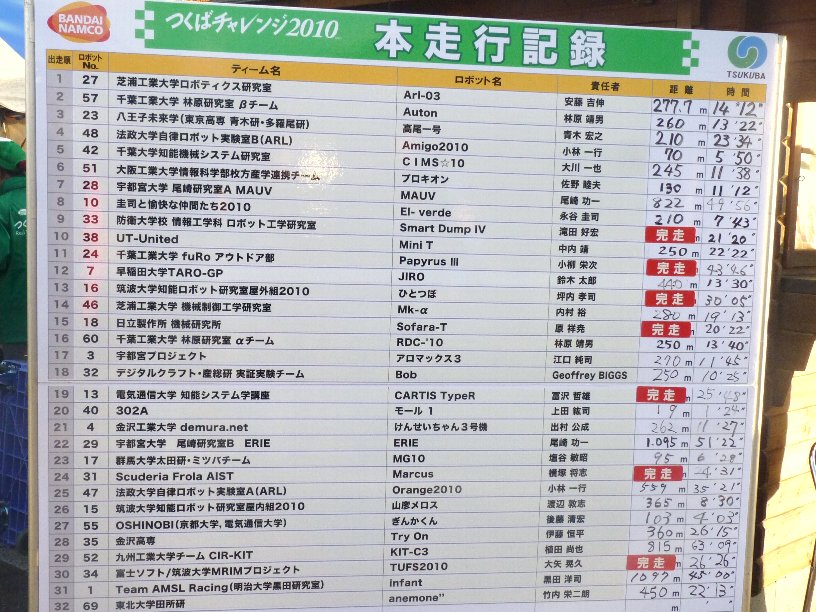
ファイナル走行の最終結果。タイムを競う競技会ではないが、中でも防衛大学校情報工学科ロボット工学研究室ティームの「Smart Dump IV」と日立製作所機械研究所ティームの「Sofara-T」は、着実で高速な走行を実現していた

最後に油田教授が結果発表と講評を行った
(もどる)
1 2
~難易度の高い約1.1Kmのコースを7ティームが完走し、課題を達成!(つづき)
●ゴールはならなかったものの惜しいティームも続出
その後、電気通信大学知能システム学講座ティームの「CARTIS TypeR」(タイム25分48秒)、Scuderia Frola AISTティームの「Marcus」(タイム24分31秒)、富士ソフト/筑波大学MRIMプロジェクトティームの「TUFS2010」(タイム26分26秒)が、見事にゴールに到達。合計で7ティームがファイナル走行を達成した。しかし、ゴールまであと数十mというところで、街路樹の縁石にぶつかってしまいリタイヤした、宇都宮大学尾崎研究室B ERIEティームの「ERIE」やTeam AMSL Racing(明治大学黒田研究室)ティームの「Infant」のように、あと一歩でゴール達成という惜しいティームも続出した。
九州工業大学 CIR-KITティームの「KIT-C3」は、815m地点でコースが左に逸れてしまい、植木鉢にぶつかりそうになり、回避するためにまっすぐバックしたのだが、その後もまた同じコースで前方に進み、またバックするというループにはまってしまった。そのループに陥っている状態のロボットのすぐそばを、杖をついた年配の方がすれ違う場面があったが、その方はロボットを気にせずにそのまま通過していった。
宇都宮プロジェクトティームの「アロマックス3」。270m地点でリタイヤしたが、その後そこからリスタートしてゴール直前まで来たが、走行コースが自動ドアがある入り口から数mずれてしまい、それ以上進めなくなってしまった
入り口まではわずか数mだが、アロマックス3はここで再び断念
電気通信大学知能システム学講座ティームの「CARTIS TypeR」。セニアカーベースのロボットで、走行もスムーズであった
CARTIS TypeRも見事ファイナル走行を達成。タイムは25分48秒
宇都宮大学尾崎研究室B ERIEティームの「ERIE」。狭い道も着実に走行している
停止線の前で、一時停止し、再びスタートするERIE。音声ガイダンス機能も備えている
ERIEは、ゴールまであとわずかの1095m地点で、街路樹の周りの縁石にぶつかりリタイヤ
Scuderia Flola AISTティームの「Marcus」。電動車椅子ベースのロボットだ
Marcusは安定した走行で、見事ゴールに到達。タイムは24分31秒だ
法政大学自律ロボット実験室A(ARL)ティームの「Orange2010」。残念ながら559m地点でリタイヤ
九州工業大学 CIR-KITティームの「KIT-C3」。順調に走行してきたが、陸橋を渡ってすぐのところで、左に逸れてしまった
KIT-C3は、植木鉢を検出してバックするのだが、また同じ方向に進んでしまい、再びバックするというループにはまってしまった
リトライを繰り返すKIT-C3の後方に、Team AMSL Racing(明治大学黒田研究室)ティームの「Infant」が接近してきたところ
KIT-C3と植木鉢との狭い隙間を、杖をついた年配の方がロボットを気にせずに通過していった様子。KIT-C3は、結局この場所(815m地点)でリタイヤ
富士ソフト/筑波大学MRIMプロジェクトティームの「TUSF2010」。前方に小型ヒューマノイドロボット「PALRO」を乗せている
TUSF2010がゴール地点近くの折り返しポイントを通過する様子
停止線の前で、一時停止するTUSF2010。PALROの音声発生機能を利用して、音声ガイダンスを行っている
TUSF2010もゴールまで無事到達。7台目の完走ロボットとなった。タイムは26分26秒
InfantがKIT-C3を追い越す様子。バックしてきたKIT-C3にInfantが危なくぶつかりそうになったのだが、緊急停止ボタンが押されてKIT-C3が停止。そのすぐ横をInfantが追い抜いていった
縁石ギリギリをすり抜けていくInfant
停止線での一時停止後、再スタートしたが、街路樹の縁石にぶつかってしまいリタイヤ。距離は1097mで、ERIEがリタイヤした場所とほぼ同じだ
●参加ティーム全体の技術レベルが大きく向上
今回のつくばチャレンジ2010は、実際に走行したティームが64ティームで、トライアル走行達成が31ティーム、ファイナル走行達成が7ティームという結果になった。ファイナル走行達成のティーム数は、2007年が3ティーム、2008年が1ティーム、2009年が5ティームであり、今回は過去最多の達成となる。課題が年々難しくなっているにもかかわらず、着実にロボット技術が進歩しているといってよいだろう。
最後に油田教授による、結果発表と講評が行われた。その中で油田教授は「走行順を変えたことで、ロボットがロボットを追い抜くシーンが増えた。他のロボットに迷惑をかけないように走行し、追い抜きや追い越しに対処するというのは、実用化を目指す上で重要な経験となるだろう。今回、完走が7ティーム、惜しかったティームが2つあったというのは、技術レベルが全体としてとても向上したといえる」と述べた。
ファイナル走行の最終結果。オレンジ色の磁石がリタイヤ地点である。番号はロボットのエントリーナンバー。トライアルゴールを通過してすぐの停止線のあたりでリタイヤしたロボットが多い
ファイナル走行の最終結果。タイムを競う競技会ではないが、中でも防衛大学校情報工学科ロボット工学研究室ティームの「Smart Dump IV」と日立製作所機械研究所ティームの「Sofara-T」は、着実で高速な走行を実現していた
最後に油田教授が結果発表と講評を行った
1 2